
推动工业文明发展
让装备智造更简单
-
-
-
 工业PC/边缘计算
凌臣科技自主研发的工业PC产品,适用于所有应用场景的工业PC和边缘计算。
工业PC/边缘计算
凌臣科技自主研发的工业PC产品,适用于所有应用场景的工业PC和边缘计算。
-
PC-Base运动控制板卡
适用于Ether-CAT总线在多轴数场景下的运动控制板卡
-
PLC控制系统(PLC、HMI、SERVO)
凌臣科技控制系统产品涵盖了LC系列PLC控制器、HMI、SERVO产品,是凌臣科技十多年运动控制行业经验基础上自主开发的运动控制型产品。
-
Smart IO远程IO产品
适用于Ether-CAT总线从站,广泛应用于3从、锂电、光伏、半导体等行业中;
-
TOKK智能传动模组
TOKK系列模组和电机是我司独立研发的直线传动产品,适用于各种工业传动场合;广泛应用于3C、锂电、光伏、半导体等行业设备之中;
-
TOKK精密运动控制平台
TOKK精密运动控制平台集合公司优质资源,对客户的生产工艺和要求进行平台化模组的订制;适用于多种精密运动位置。
-
战略合作商
凌臣科技是台湾凌华、ABB、TOYO、ACS、TRIO等品牌在中国大陆重要的合作伙伴
-
-


凌臣科技龙门控制平台、柔性回原及定位精度补偿功能应用
凌臣科技龙门控制采用高性能驱动器内置龙门算法,主从之间使用10M高速通信生成电流控制信号来同步两个Y1、Y2轴,并实时监控主从轴之间位置偏差进行动态调整,可以实现主从轴之间负荷平均分配,搭配凌臣自主研发高精度龙门平台可以拥有更高的速度、加速度、定位精度、重复定位精度、直线度、正交度。
一、凌臣科技龙门控制平台解决方案
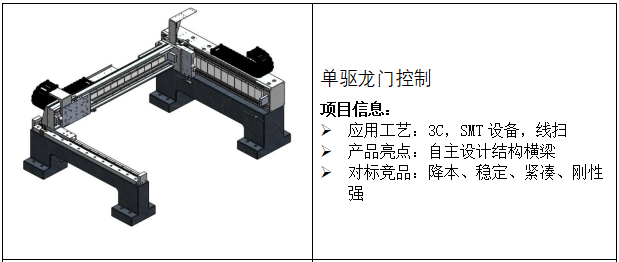
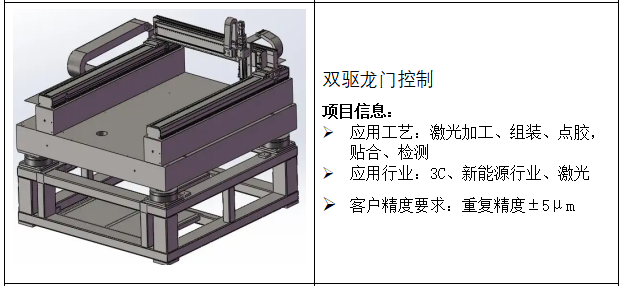

图1: 凌臣科技双驱龙门平台非标定制(图片来源于网络)
二、龙门的控制方法有很多种,比较常见的有以下几种:
单反馈,单电机:只在其中一边有电机提供动力,另一边则由导轨支撑,通过机械应力来运动。此方法比较经济,适用于低速、小跨距、轻负载、精度要求不高应用场合。
单反馈,多电机:相当于把两个电机并联,一组控制信号同时控制两个电机。此方法控制比较简单,但是由于机械和电机的一致性很难保证,两个电机电流环控制精度不好导致推力不均衡,控制性能差。
主从控制:凌臣科技龙门控制采用高性能驱动器内置龙门算法,主从之间使用10M高速通信生成电流控制信号来同步两个Y1、Y2轴,并实时监控主从轴之间位置偏差进行动态调整,可以实现主从轴之间负荷平均分配,搭配凌臣自主研发高精度龙门平台可以拥有更高的速度、加速度、定位精度、重复定位精度、直线度、正交度。

图:2:主从控制龙门算法原理示意图
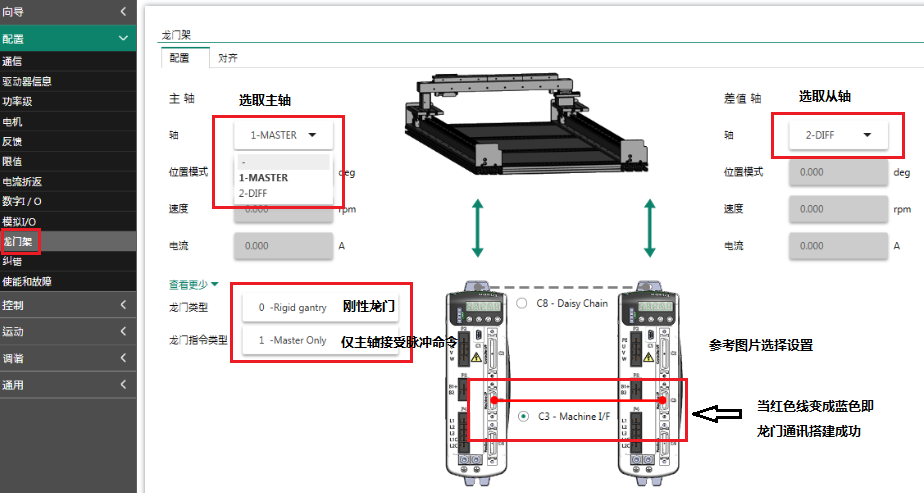
图3:主从龙门控制配置界面
交叉解耦算法:凌臣科技高精度龙门双驱平台采用独特交叉解耦控制算法以Gantry方向轴和Yaw扭摆轴两个控制对象来控制,而不是控制两个单独的电机,减少耦合的影响此方法可以最大程度提高控制性能。 搭配凌臣自主研发高精度龙门平台可以拥有更高的速度、加速度、定位精度、重复定位精度、直线度、正交度。
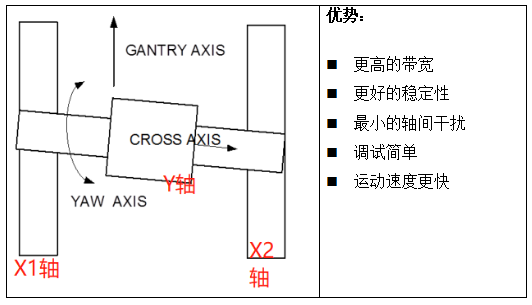
图:4:交叉解耦龙门控制原理示意图
二、柔性回零
产生背景:
设备刚性龙门模式,按以下步骤通过相机抓图对回零重复精度进行测试。
测试步骤:龙门断使能-手推一下-龙门上使能-回零后拍照。(其他轴都使能不动,只动龙门轴)。
测试结果:测试几次拍照重复定位误差很大能够到40-50um。
原因分析:刚性龙门算法要求设备要具有绝对刚性,特别对一些是跨度比较大、横梁比较重也不是绝对刚性,每次龙门断使能特别是断使能再用手推一下后会产生形变,轴系姿态发生变化。然而传统刚性龙门算法回零是以主轴单独控制寻找index刻线回零,从轴没有动力依靠系统横梁机械刚性与主轴同步,这样受限于系统机械刚性从轴无法调整位置保证每次回零后位置一致性,所以会产生回零重复性问题。
柔性原理:使用驱动器回零,主从轴都需要加装index点,并且需要提前测算出两个index之间的距离gantryoffset,并在从轴设定。
龙门执行以下回零过程:
找主轴index---
找从轴index---
对齐方式及偏置设置及校准---
主轴按照回原模式回原点找index---回零完成。
此时驱动器内部也会测算从轴的位置Calc,并计算与gantryoffset的差值Err,在回零过程中第二次回到主轴index的时候将差值Err补进去,以保证每次主从轴的相对位置一致。
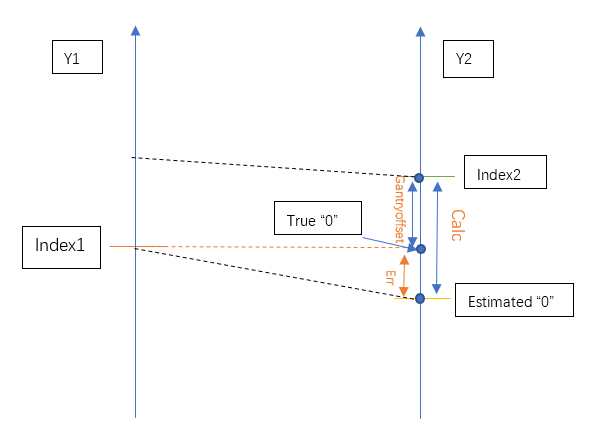
图5:柔性龙门回零原理操作
柔性龙门校准模式、偏置、校准功能启动

图6:开启gantryoffset
结果:设置为柔性龙门后,按照按以上步骤测试回零精度,主从轴电机的实际位置在3um内波动(可通过终端输入MFBRAW查看),相机的拍照精度在5um,满足客户要求。
三、位置误差补偿
在高精度场合应用时我们往往会出现系统定位精度出现问题,导致系统无法按照客户需求精度运行,因此客户对设备精度产生怀疑。这种精度误差有以下几个方面造成:
阿贝误差
环境温度影响
余弦误差
死程误差
这些误差的存在如果不经过补偿修正是消除不掉的,可以通过激光干涉仪可直接测量,测量后实际位置误差数据可以直接导入驱动器内置误差补偿表。
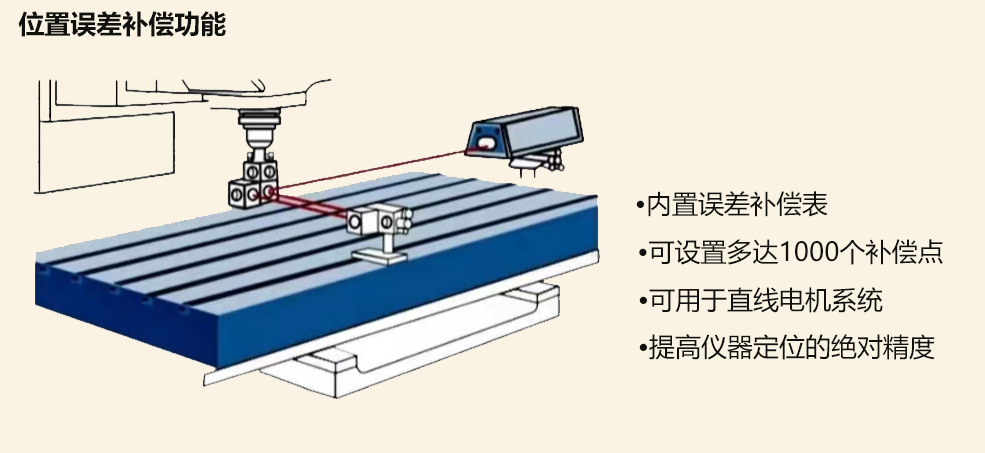
图7伺服驱动器内部位置误差补偿功能
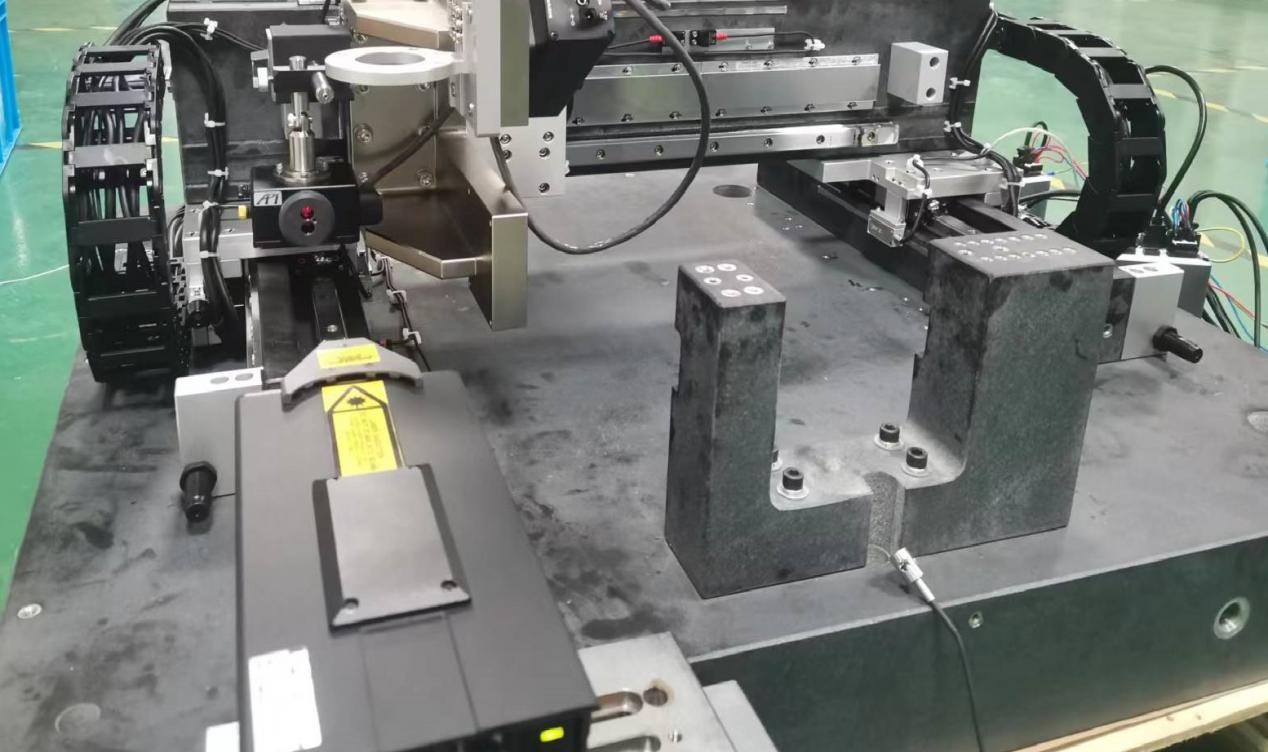
图8激光干涉仪测量直线电机系统定位精度
位置误差补偿文件导入伺服驱动器

图9伺服驱动器内部位置误差补偿表
干涉仪测量直线电机系统,位置精度补偿前与补偿后的对比:
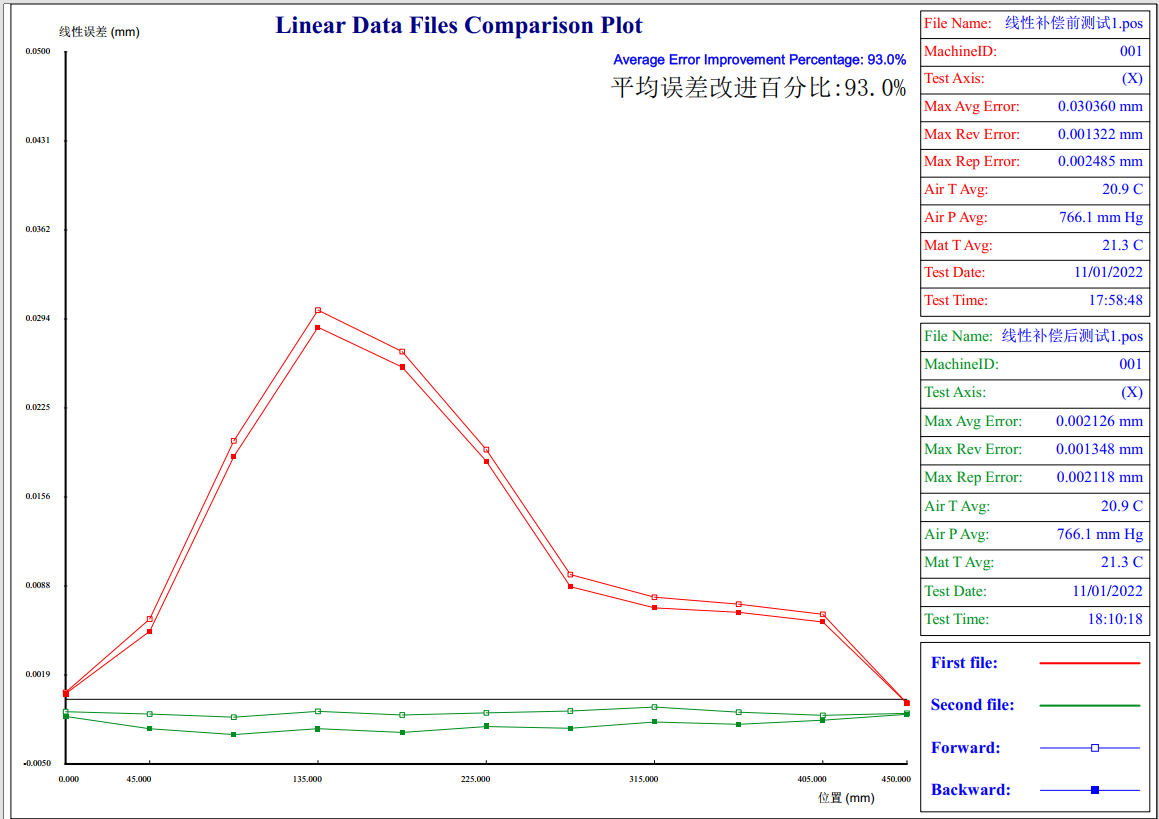
图10 干涉仪精度测量位置精度报告
激光干涉仪测量, 补偿前可得定位平均偏差为0.030360mm。(图中红色)
激光干涉仪测量,补偿后可得定位平均偏差为 0.002126mm。(图中绿色)
双驱龙门平台,凌臣高精度龙门平台
Previous page
Next page
相关方案

暂无数据
LINGCHEN TECH
New Automation Technology
中国区总部
苏州市相城区望亭镇巨华路55号
扫描添加微信
获取产品报价